☷
- О ТУСУРе
- Абитуриентам
-
Студентам
- Первокурсникам
- Расписание занятий
- Система дистанционного обучения
- Научно-образовательный портал
- Библиотека
- Групповое проектное обучение
- Журнал посещаемости
- Журнал успеваемости
- Клубы по интересам
- Спорт в ТУСУРе
- Профком студентов
- Содействие трудоустройству
- Облачное хранилище ТУСУРа
- Поддержка студенческих семей
- Поддержка участников СВО и их детей
- Аспирантам
-
Сотрудникам
- Телефонный справочник
- Расписание занятий
- Система дистанционного обучения
- Научно-образовательный портал
- Библиотека
- Журнал посещаемости
- Журнал успеваемости
- Генератор рабочих программ
- Генератор ОПОП
- Генератор ИПРП
- Показатели эффективности труда ППС
- Спорт в ТУСУРе
- Профком сотрудников
- Облачное хранилище ТУСУРа
- Выпускникам
- Партнёрам

Программно-алгоритмическое обеспечение задачи оценки координат наземного подвижного излучающего объекта в пассивной угломерной системе с одним (двумя) БПЛА
Описание
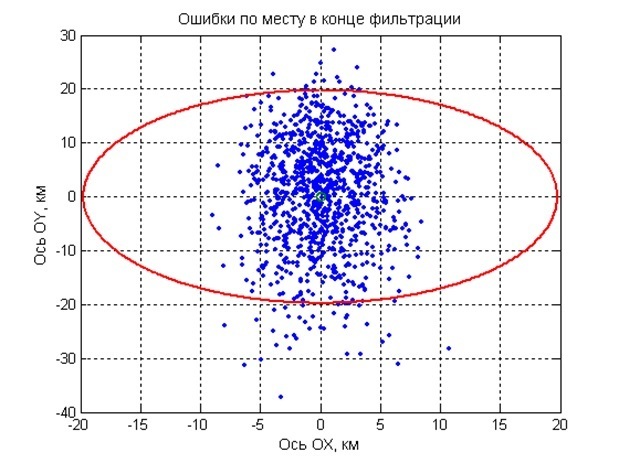
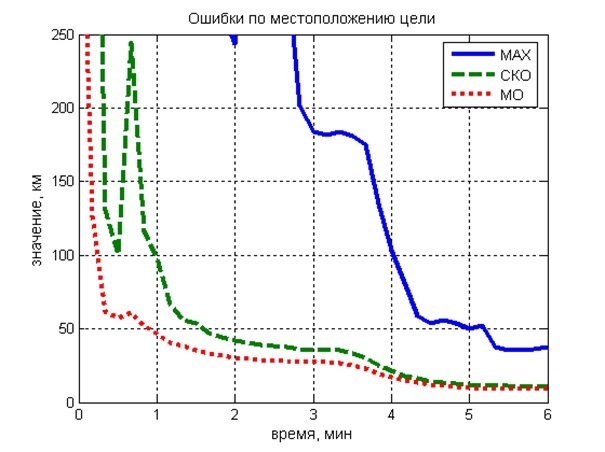
Разработаны и испытаны алгоритмы для решения задачи пассивного целеуказания по радиоизлучению наземного подвижного объекта с помощью одного или двух угломеров, размещенных на борту 1 (2) БПЛА. Фильтрация оценок координат и параметров движения цели реализуется с использованием алгоритма сигма-точечного адаптивного фильтра Калмана. Алгоритм допускает наличие систематической погрешности пеленгования. Выполнение маневра при движении БПЛА позволяет формировать устойчивые оценки координат к наличию неизвестной систематической погрешности пеленга.
Технические характеристики
- Относительная погрешность по дальности – до 10 % при макс Д=180 км
- Время измерения до 5мин
- Систематическая погрешность пеленга до ± 20
- СКО пеленга 0.50
- Взаимная привязка угломеров – система ГЛОНАСС
Преимущества
- Адаптация системы к наличию систематических ошибок пеленгования
- Малая величина пространственного разнесения угломеров.
- Формирование оценок координат и параметров движения наземной излучающей цели
Область применения
Дальнее загоризонтное целеуказание УРО
Ключевые слова: Пассивная радиолокация, Пеленгатор, Определение местоположения, Подвижная цель, Систематическая ошибка